| 基于观测器的人在环多机械臂系统预设性能二分一致性 |
| |
| 引用本文: | 刘沛明, 郭祥贵. 基于观测器的人在环多机械臂系统预设性能二分一致性. 自动化学报, 2024, 50(9): 1761−1771 doi: 10.16383/j.aas.c230622 |
| |
| 作者姓名: | 刘沛明 郭祥贵 |
| |
| 作者单位: | 1.北京科技大学自动化学院 北京 100083;;2.北京市工业波谱成像工程技术研究中心 北京 100083 |
| |
| 基金项目: | 雄安新区科技创新专项 (2023XAGG0062), 国家自然科学基金 (62173028, 62233015), 广东省基础与应用基础研究基金 (2024A1515011493), 北京自然科学基金 (4232060, IS23065)资助 |
| |
| 摘 要: | 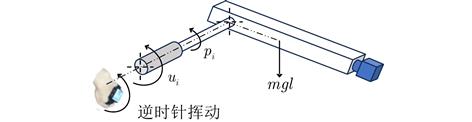
研究通讯拓扑为符号有向图的人在环多机械臂系统的预设性能二分一致性跟踪控制问题. 为在预设时间内收敛到预设精度, 提出一种基于观测器的预设性能控制策略. 首先, 设计预设时间和精度的观测器以估计领导者的输出信息, 通过合作/竞争信息交互实现观测器输出的二分一致性. 该观测器不需要领导机械臂的输入信息及输出信息的高阶导数, 并通过无芝诺行为的事件触发机制降低不同机械臂间的通讯负担.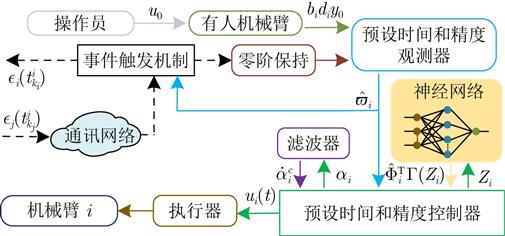
其次, 通过反步法及误差转化法将有约束的机械臂输出跟踪问题转化为无约束的误差系统稳定性问题, 进而基于观测器输出设计机械臂的输出调节控制器. 值得一提的是, 设计的控制策略不需要系统初始状态的先验知识且避免了预设时刻控制增益无穷大的现象, 增强了系统的可靠性. 最后, 仿真结果表明所提控制策略的可行性及优越性.

|
| 关 键 词: | 多机械臂系统 二分一致性 预设时间和精度 人在环控制 |
| 收稿时间: | 2023-10-09 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载免费的PDF全文 |
|