| 一种基于高斯混合模型的轨迹预测算法 |
| |
| 作者姓名: | 乔少杰 金琨 韩楠 唐常杰 格桑多吉 Louis Alberto GUTIERREZ |
| |
| 作者单位: | 西南交通大学 信息科学与技术学院, 四川 成都 610031,西南交通大学 信息科学与技术学院, 四川 成都 610031,西南交通大学 生命科学与工程学院, 四川 成都 610031,四川大学 计算机学院, 四川 成都 610065,西藏大学 藏文信息技术研究中心, 西藏 拉萨 850000,Department of Computer Science, Rensselaer Polytechnic Institute, New York, USA |
| |
| 基金项目: | 国家自然科学基金(61100045, 61165013); 教育部高等学校博士学科点专项科研基金(20110184120008); 教育部人文社会科学研究青年基金(14YJCZH046); 中央高校基本科研业务费专项资金(2682013BR023); 科学计算与智能信息处理广西高校重点实验室开放课题(GXSCIIP201407) |
| |
| 摘 要: | 
在智能交通控制系统、军事数字化战场、辅助驾驶系统中,实时、精确、可靠的移动对象不确定性轨迹预测具有极高的应用价值.智能轨迹预测不仅可以提供精准的基于位置的服务,而且可以提前监测和预判交通状况,进而推荐最佳路线,已经成为移动对象数据库研究的热点,亟需设计准确而高效的位置预测方法.针对现有方法的不足,提出了基于高斯混合模型的轨迹预测方法GMTP,主要步骤包括:(1) 针对复杂运动模式利用高斯混合模型建模;(2) 利用高斯混合模型计算不同运动模式的概率分布,进而将轨迹数据划分为不同分量;(3) 利用高斯过程回归预测移动对象最可能的运动轨迹.GMTP是高斯非线性概率统计模型,其优势在于:计算结果不仅是位置预测值,更是关于移动对象未来所有可能运动轨迹的概率分布,可以利用概率统计分布特性获得某种运动模式(如匀加速运动)下的位置预测.大量真实轨迹数据集上的实验结果表明:与相同参数设置下的高斯回归预测和卡尔曼滤波预测法相比,GMTP的预测准确性平均提高了22.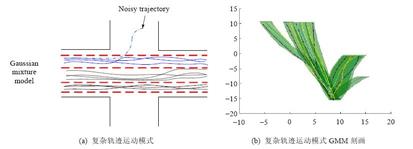
2%和23.8%,预测时间平均缩减了92.7%和95.9%.

|
| 关 键 词: | 移动对象数据库 轨迹预测 高斯混合模型 运动模式 |
| 收稿时间: | 2014-07-10 |
| 修稿时间: | 2014-11-25 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《软件学报》浏览原始摘要信息 |
|
点击此处可从《软件学报》下载免费的PDF全文 |
|