| 基于变参数阻抗控制的机器人恒力打磨研究 |
| |
| 引用本文: | 郑帅, 国凯, 孙杰. 基于变参数阻抗控制的机器人恒力打磨研究[J]. 制造技术与机床, 2024, (3): 9-15. DOI: 10.19287/j.mtmt.1005-2402.2024.03.001 |
| |
| 作者姓名: | 郑帅 国凯 孙杰 |
| |
| 作者单位: | 1.山东大学机械工程学院,山东 济南 250061 |
| |
| 基金项目: | 国家自然科学基金(51975335、52175419、52375452);;国家重点研发计划(2022YFB3206701); |
| |
| 摘 要: | 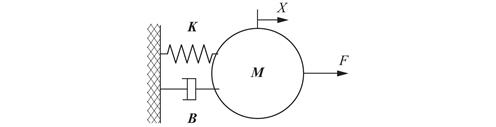
面向机器人恒力打磨需求,文章设计了阻抗参数在线调整与离线优化的自适应阻抗控制算法,实现了打磨力控制。自适应阻抗控制算法将刚度参数作为时变参数,根据打磨接触力实时在线调整,以消除打磨过程中的稳态误差。针对阻尼参数和惯性参数难以整定的问题,以降低系统超调量和调整时间作为优化目标,采用改进粒子群算法进行阻抗参数离线优化。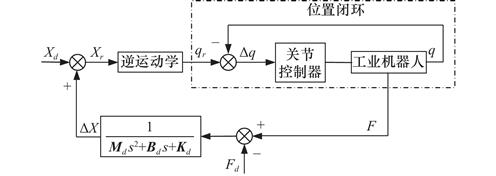
进行了机器人恒力打磨仿真,仿真结果表明,该方法可以综合改善机器人的恒力控制性能。开展了机器人恒力打磨实验,实验结果表明,该方法可以有效地提高机器人打磨表面质量。

|
| 关 键 词: | 机器人打磨 恒力打磨 改进粒子群算法 自适应阻抗控制 参数优化 |
| 修稿时间: | 2023-11-01 |
|
| 点击此处可从《制造技术与机床》浏览原始摘要信息 |
|
点击此处可从《制造技术与机床》下载免费的PDF全文 |
|