| 通信受限的多智能体系统二分实用一致性 |
| |
| 引用本文: | 陈世明, 姜根兰, 张正. 通信受限的多智能体系统二分实用一致性. 自动化学报, 2022, 48(5): 1318−1326 doi: 10.16383/j.aas.c200600 |
| |
| 作者姓名: | 陈世明 姜根兰 张正 |
| |
| 作者单位: | 1.华东交通大学电气与自动化工程学院 南昌 330013 |
| |
| 基金项目: | 国家自然科学基金(61973118,11662002,61763013); |
| |
| 摘 要: | 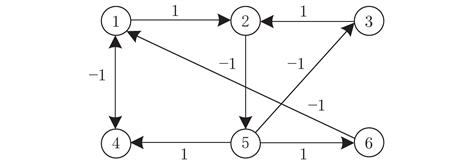
针对存在量化数据、通信时滞等通信约束以及带有竞争关系的多智能体系统, 研究其二分实用一致性问题, 提出了一种基于量化器的分布式控制协议. 该协议基于结构平衡拓扑假设, 通过规范变换将具有竞争关系系统转变为具有非负连接权重系统, 使二分实用一致性问题转变为一般实用一致性问题.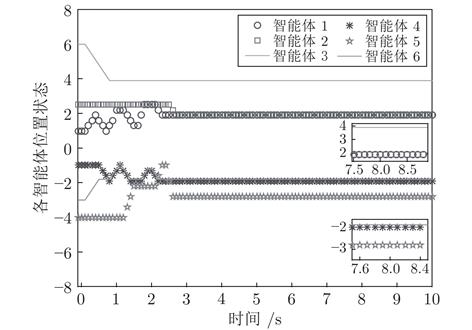
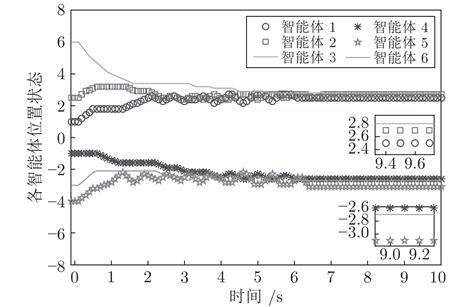
利用微分包含理论、菲利波夫解的框架、代数图论以及Lyapunov稳定性理论, 证明了在本文所提控制策略下, 具有竞争关系的多智能体系统能实现二分实用一致, 即智能体状态收敛至模相同但符号不同的可控区间, 并给出了误差收敛上界值. 仿真试验进一步验证了理论结果的有效性.
|
| 关 键 词: | 多智能体系统 符号图 二分实用一致性 量化数据 通信时滞 |
| 收稿时间: | 2020-07-29 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载免费的PDF全文 |
|