|
|||||
|
|
| 微创外科手术机器人技术研究进展 | |
| 作者姓名: | 付宜利 潘博 |
| 作者单位: | 机器人技术与系统国家重点实验室(哈尔滨工业大学),哈尔滨,150001;机器人技术与系统国家重点实验室(哈尔滨工业大学),哈尔滨,150001 |
| 基金项目: | 国家自然科学基金(61305139); 国家高技术研究发展计划(2012AA041601) |
| 摘 要: | 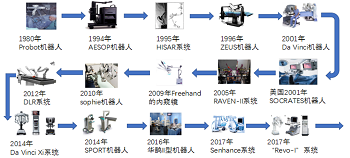 为实现外科手术的微创化、精确化、智能化、远程化,将机器人技术与微创外科手术相结合,在综述国内外微创外科手术机器人研究现状的基础上,重点论述和分析从操作手设计、控制结构与控制方法,对力反馈主手、手术器械及力感知、增强现实、半自主手术、手术训练系统等关键技术进行了介绍和分析.基于上述技术研发的微创外科手术机器人改善了医生进行微创手术的环境和工具,提高了外科手术的质量,具有广泛的应用和发展前景.对微创外科手术机器人技术的发展趋势进行了展望. |
| 关 键 词: | 机器人 微创外科手术 主从控制 远心运动 力反馈 |
| 收稿时间: | 2018-06-27 |
| 本文献已被 CNKI 万方数据 等数据库收录! | |
| 点击此处可从《哈尔滨工业大学学报》浏览原始摘要信息 | |
| 点击此处可从《哈尔滨工业大学学报》下载全文 | |