| 基于深度强化学习算法的机器人浮动打磨执行装置研究 |
| |
| 引用本文: | 张一然, 杨龙, 袁博, 李长耿. 基于深度强化学习算法的机器人浮动打磨执行装置研究[J]. 制造技术与机床, 2023, (11): 18-22, 28. DOI: 10.19287/j.mtmt.1005-2402.2023.11.002 |
| |
| 作者姓名: | 张一然 杨龙 袁博 李长耿 |
| |
| 作者单位: | 中车青岛四方机车车辆股份有限公司,山东 青岛 266111 |
| |
| 摘 要: | 
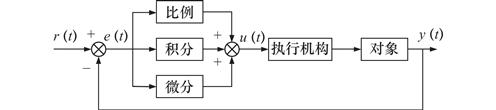
为实现机器人恒力打磨的需求,文章设计了浮动打磨执行器,进行了打磨控制算法研究和浮动打磨执行器的结构设计,并对浮动打磨执行器系统进行受力分析和动力学建模。在传统PID控制算法的基础上,采用DDPG深度强化学习算法进行PID控制参数的整定,并开展浮动打磨执行器恒力性能实验验证。
实验结果表明,文章设计的浮动打磨执行器能够满足恒力控制的要求。通过DDPG深度强化学习算法对PID控制参数整定,减少了繁琐的调参步骤,且具有更好的恒力控制性能。
|
| 关 键 词: | 浮动打磨 恒力控制 深度强化学习 |
| 修稿时间: | 2023-08-13 |
|
| 点击此处可从《制造技术与机床》浏览原始摘要信息 |
|
点击此处可从《制造技术与机床》下载免费的PDF全文 |
|