| 孪生网络框架下融合显著性和干扰在线学习的航拍目标跟踪算法 |
| |
| 引用本文: | 孙锐, 方林凤, 梁启丽, 张旭东. 孪生网络框架下融合显著性和干扰在线学习的航拍目标跟踪算法[J]. 电子与信息学报, 2021, 43(5): 1414-1423. doi: 10.11999/JEIT200140 |
| |
| 作者姓名: | 孙锐 方林凤 梁启丽 张旭东 |
| |
| 作者单位: | 1.合肥工业大学计算机与信息学院 合肥 230009;;2.工业安全与应急技术安徽省重点实验室 合肥 230009 |
| |
| 基金项目: | 国家自然科学基金(61471154, 61876057),安徽省重点研发计划-科技强警专项(202004d07020012) |
| |
| 摘 要: | 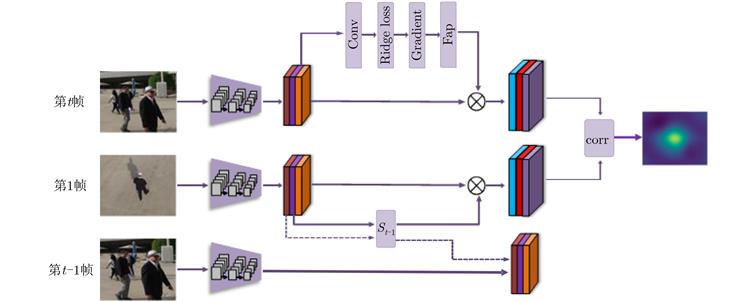
针对一般跟踪算法不能很好地解决航拍视频下目标分辨率低、视场大、视角变化多等特殊难点,该文提出一种融合目标显著性和在线学习干扰因子的无人机(UAV)跟踪算法。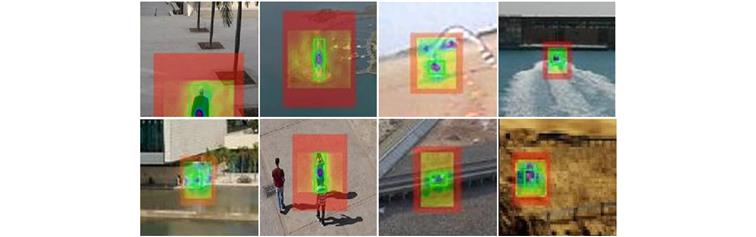
通用模型预训练的深层特征无法有效地识别航拍目标,该文跟踪算法能根据反向传播梯度识别每个卷积滤波器的重要性来更好地选择目标显著性特征,以此凸显航拍目标特性。另外充分利...

|
| 关 键 词: | 目标跟踪 无人机航拍场景 孪生网络 目标显著性 在线学习干扰因子 |
| 收稿时间: | 2020-03-03 |
| 修稿时间: | 2020-10-21 |
|
| 点击此处可从《电子与信息学报》浏览原始摘要信息 |
|
点击此处可从《电子与信息学报》下载免费的PDF全文 |
|