| 软体机械臂水下自适应鲁棒视觉伺服 |
| |
| 引用本文: | 徐璠, 王贺升. 软体机械臂水下自适应鲁棒视觉伺服. 自动化学报, 2023, 49(4): 744−753 doi: 10.16383/j.aas.c200457 |
| |
| 作者姓名: | 徐璠 王贺升 |
| |
| 作者单位: | 1.上海交通大学电子信息与电气工程学院自动化系 上海 200240 |
| |
| 基金项目: | 国家自然科学基金(62073222, 61722309)资助 |
| |
| 摘 要: | 
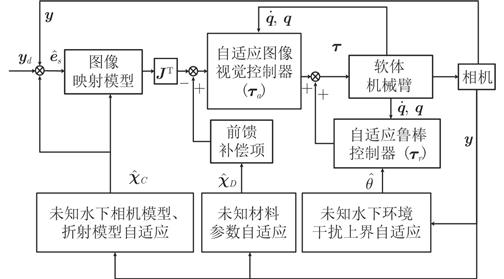
水下仿生软体机器人在水底环境勘测, 水下生物观测等方面具有极高的应用价值. 为进一步提升仿章鱼臂软体机器人在特殊水下环境中控制效果, 提出一种自适应鲁棒视觉伺服控制方法, 实现其在干扰无标定环境中的高精度镇定控制.
基于水底动力学模型, 设计保证动力学稳定的控制器; 针对柔性材料离线标定过程繁琐、成本高, 提出材料参数自适应估计算法; 针对水下特殊工作条件, 设计自适应鲁棒视觉伺服控制器, 实现折射效应的在线补偿, 并通过自适应未知环境干扰上界, 避免先验环境信息的求解. 所提算法在软体机器人样机中验证其镇定控制性能, 为仿生软体机器人的实际应用提供理论基础.
|
| 关 键 词: | 软体机器人 自适应鲁棒控制 无标定视觉伺服 水下视觉伺服 |
| 收稿时间: | 2020-06-24 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载免费的PDF全文 |
|