| 面向自动驾驶的车辆精确实时定位算法 |
| |
| 引用本文: | 沈连丰, 张瑞, 朱亚萍, 吴怡. 面向自动驾驶的车辆精确实时定位算法[J]. 电子与信息学报, 2020, 42(1): 28-35. doi: 10.11999/JEIT190610 |
| |
| 作者姓名: | 沈连丰 张瑞 朱亚萍 吴怡 |
| |
| 作者单位: | 1.东南大学移动通信国家重点实验室 南京 210096;;2.福建师范大学光电与信息工程学院 福州 350007 |
| |
| 基金项目: | 国家自然科学基金(61601122, 61741102, U180526, 61571128) |
| |
| 摘 要: | 
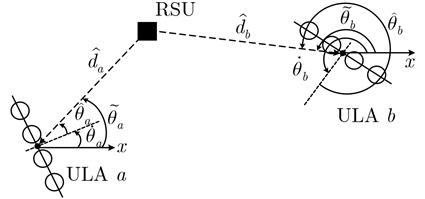
针对车辆自组织网络(VANETs)中的车辆定位问题,以提高定位精度和实时性为目标,该文提出一种面向自动驾驶的车辆精确实时定位算法,包括基于矩阵束(MP)与非线性拟合(NLF)以及基于视觉感知两种技术。基于MP-NLF的技术通过联合TOA/AOA估计进行车辆单站定位,并引入高分辨率估计以提高估计精度;基于视觉感知的技术通过提取定位范围内视觉感知图像的特征信息来完成定位,并结合惯性信息进行无迹卡尔曼滤波进一步提高精度。
仿真结果表明,与传统多径指纹算法相比,所提算法即使在低信噪比情况下也具有较好的定位性能。
|
| 关 键 词: | 车辆自组织网络 定位 路边单元 高分辨率估计 |
| 收稿时间: | 2019-08-12 |
| 修稿时间: | 2019-11-21 |
|
| 点击此处可从《电子与信息学报》浏览原始摘要信息 |
|
点击此处可从《电子与信息学报》下载免费的PDF全文 |
|