| 融合金字塔结构与注意力机制的煤矿井下巡检机器人PT目标检测算法 |
| |
| 引用本文: | 王茂森,鲍久圣,鲍周洋,等. 融合金字塔结构与注意力机制的煤矿井下巡检机器人PT目标检测算法[J]. 煤炭科学技术,2024,52(6):206−215. DOI: 10.12438/cst.2023-1071 |
| |
| 作者姓名: | 王茂森 鲍久圣 鲍周洋 阴妍 王祥赛 葛世荣 |
| |
| 作者单位: | 1.中国矿业大学 机电工程学院, 江苏 徐州 221116;2.中国矿业大学(北京) 机械与电气工程学院, 北京 100083) |
| |
| 基金项目: | 煤矿采掘机械装备国家工程实验室开放课题资助项目 ( GCZX-2023-01 );中央高校基本科研业务费专项资金资助项目 ( 2022XSCX27 );江苏高校优势学科建设工程资助项目 ( PAPD ) |
| |
| 摘 要: | 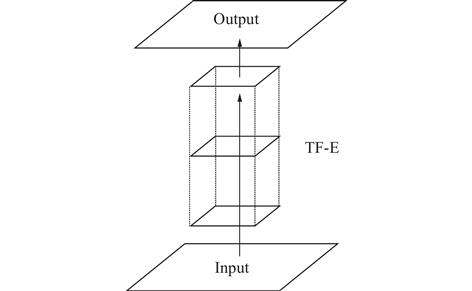
近年来,煤矿机器人已成为现代煤机装备领域的研究热点,多数煤矿的主煤流运输系统基本实现了连续化、机械化和自动化,因此对主运输巷道内的安全监控与巡检效率提出了更高的要求,而精准的目标检测是实现煤矿井下智能化安全监控的必要保障,但现有的目标检测算法应用于复杂恶劣的煤矿井下巷道环境,存在目标检测精度较低的问题。面向井下低照明、环境杂乱的特殊工况检测需求,制作了井下巷道环境内目标物数据集,完成数据集标注并展开多维度分析;提出一种基于金字塔结构与注意力机制融合的PT目标检测算法,利用注意力机制模块替换金字塔结构中的卷积模块,在控制特征计算量的同时提高对全局特征的提取能力,实现目标物局部特征与全局特征融合的提取效果,提高了图像中目标感兴趣区域特征的表达能力。最后,面向煤矿井下巡检机器人应用场景,将提出的PT算法与传统经典的Faster R-CNN、YOLOv4算法进行对比分析。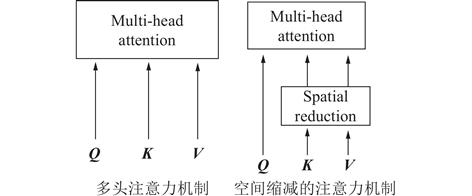
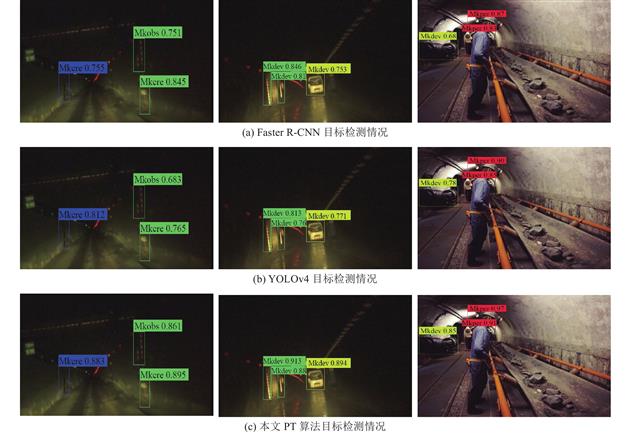
结果表明:所提出的PT目标检测算法能够有效识别复杂环境下巷道内目标物,相较于主流的Faster R-CNN、YOLOv4目标检测网络,PT算法有更好的综合识别能力,识别煤矿人员的准确率分别提升了2.90%和4.30%,识别井下障碍的准确率分别提升0.20%和4.80%,识别矿井裂缝的准确率分别提升了4.40%和8.60%,识别井下设备的准确率分别提升了3.00%和8.70%。因此,PT目标检测算法能够更好地适应井下环境,目标检测算法较其他算法能够获得更高的准确率与检测速度,可为井下巷道安控系统建设提供理论依据与技术支撑。
|
| 关 键 词: | 煤矿井下 巡检机器人 目标检测 金字塔结构 注意力机制 |
| 收稿时间: | 2023-07-23 |
| 本文献已被 万方数据 等数据库收录! |
| 点击此处可从《煤炭科学技术》浏览原始摘要信息 |
|
点击此处可从《煤炭科学技术》下载全文 |
|