| 基于伪谱法的双摆吊车时间最优消摆轨迹规划策略 |
| |
| 引用本文: | 陈鹤, 方勇纯, 孙宁, 钱彧哲. 基于伪谱法的双摆吊车时间最优消摆轨迹规划策略. 自动化学报, 2016, 42(1): 153-160. doi: 10.16383/j.aas.2016.c150307 |
| |
| 作者姓名: | 陈鹤 方勇纯 孙宁 钱彧哲 |
| |
| 作者单位: | 1.南开大学机器人与信息自动化研究所 天津 300071;;2.南开大学天津市智能机器人技术重点实验室 天津 300071 |
| |
| 基金项目: | 国家科技支撑计划(2013BAF07B03),国家杰出青年科学基金(61325017),天津市自然科学基金(15JCQNJC03800),国家自然科学基金(61503200)资助 |
| |
| 摘 要: | 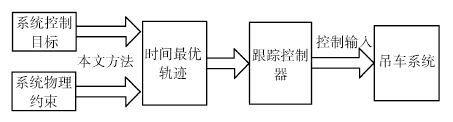
在工业生产过程中,桥式吊车系统经常会体现出双摆系统的特性,导致更多欠驱动状态量的出现,增大控制难度.基于此,论文提出了一种针对双摆桥式吊车系统的时间最优轨迹规划方法,可以得到全局时间最优且具有消摆能力的轨迹.具体而言,为方便地构造以时间为代价函数的优化问题,首先对系统运动学模型进行相应的变换;在此基础上,考虑包括两级摆角及台车速度和加速度上限值在内的多种约束,构造出相应的优化问题;然后,利用高斯伪谱法(Gauss-pseudospectral method, GPM)将该带约束的优化问题转化为更易于求解的非线性规划问题,且在转化过程中,可以非常方便地考虑轨迹约束.求解该非线性规划问题,即可得到时间最优的台车轨迹.不同于已有的大多数方法,该方法可获得全局时间最优的结果.最后,通过仿真与实验结果验证了这种时间最优轨迹规划方法具有满意的控制性能.
|
| 关 键 词: | 双摆吊车系统 时间最优 轨迹规划 高斯伪谱法 |
| 收稿时间: | 2015-05-18 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载免费的PDF全文 |
|