| 基于全驱系统方法的高阶严反馈系统时变输出约束控制 |
| |
| 引用本文: | 蔡光斌, 肖永强, 胡昌华, 杨小冈, 凡永华. 基于全驱系统方法的高阶严反馈系统时变输出约束控制. 自动化学报, 2024, 50(2): 372−385 doi: 10.16383/j.aas.c230441 |
| |
| 作者姓名: | 蔡光斌 肖永强 胡昌华 杨小冈 凡永华 |
| |
| 作者单位: | 1.火箭军工程大学导弹工程学院 西安 710025;;2.西北工业大学航天学院 西安 710072 |
| |
| 基金项目: | 国家自然科学基金(61773387, 62073096), 国家自然科学基金委基础科学中心项目(62188101)资助 |
| |
| 摘 要: | 
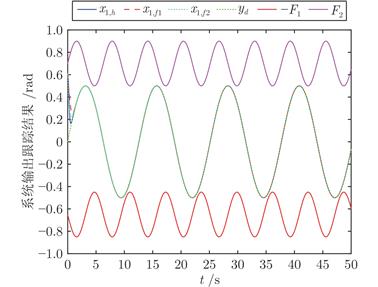
针对输出受不对称时变约束的不确定高阶严反馈系统, 提出一种基于全驱系统方法的高阶自适应动态面输出约束控制方法. 所研究的高阶严反馈系统, 每个子系统都是高阶形式, 通过非线性转换函数将原输出约束系统转换为新的无约束系统, 从而将原系统输出约束问题转化为新系统输出有界的问题. 进一步结合全驱系统方法和自适应动态面控制, 直接将每个高阶子系统作为一个整体进行控制器设计, 而不需要将其转化为一阶系统形式, 有效简化了设计步骤; 同时通过引入一系列低通滤波器来获得虚拟控制律的高阶导数, 以代替复杂的微分运算.
基于Lyapunov稳定性理论证明闭环系统所有信号是一致最终有界的, 系统输出在满足约束的条件下能有效跟踪期望的参考信号, 且可通过调整参数使得系统跟踪误差收敛到零附近的足够小的邻域内. 最后, 通过对柔性关节机械臂系统进行仿真, 验证了所提出控制方法的有效性.
|
| 关 键 词: | 全驱系统方法 高阶严反馈系统 时变输出约束 非线性转换函数 自适应动态面控制 |
| 收稿时间: | 2023-07-19 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载免费的PDF全文 |
|