|
|||||
|
|
| 双滤波器捷联惯导外阻尼导航算法 | |
| 作者姓名: | 赵琳 李久顺 程建华 |
| 作者单位: | 哈尔滨工程大学自动化学院 |
| 基金项目: | 国家自然科学基金(61633008) |
| 摘 要: | 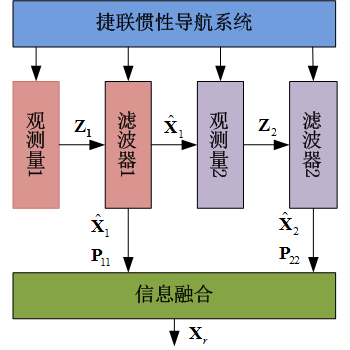 针对捷联惯导系统导航精度受系统振荡误差严重影响的问题,提出一种基于双滤波器的捷联惯导外阻尼导航算法.该算法设计了两个串行滤波器,第一个滤波器以外速度为参考输入对外部速度作平滑处理并得到捷联惯导系统误差状态估计值,第二个滤波器利用平滑后的高精度外部参考速度,以速度变化量作为外部参考输入进行状态估计,屏蔽速度常值误差对系统的影响,最后,设计信息融合算法,将两个滤波器得到的估计状态进行融合,使得导航结果兼顾双滤波器的优点.仿真验证表明:存在外速常值误差时,相较于滤波器2而言,经过信息融合后的导航误差的地球振荡误差收敛速度明显加快,其短期精度得到显著提高;相较于滤波器1而言,经过信息融合后,其稳态导航精度得到显著提高;该方法具有较高的稳态精度,可缩短外阻尼系统误差收敛时间,有效提高捷联惯导系统导航精度. |
| 关 键 词: | 外阻尼 捷联惯导系统 串行滤波器 信息融合 速度常值误差 |
| 收稿时间: | 2016-12-12 |
| 本文献已被 CNKI 等数据库收录! | |
| 点击此处可从《哈尔滨工业大学学报》浏览原始摘要信息 | |
| 点击此处可从《哈尔滨工业大学学报》下载全文 | |