| 2自由度铰接车体车辆越障偏移饱和控制 |
| |
| 作者姓名: | 寇伟 刘昕晖 陈伟 |
| |
| 作者单位: | 吉林大学 机械科学与工程学院,130022 长春;汽车仿真与控制国家重点实验室吉林大学,130022 长春,吉林大学 机械科学与工程学院,130022 长春;汽车仿真与控制国家重点实验室吉林大学,130022 长春,吉林大学 机械科学与工程学院,130022 长春;汽车仿真与控制国家重点实验室吉林大学,130022 长春 |
| |
| 基金项目: | 国家自然科学基金(51405187). |
| |
| 摘 要: | 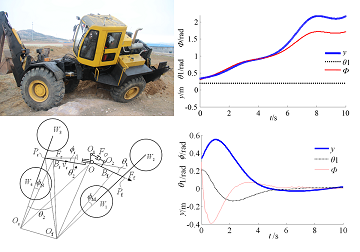
针对2自由度铰接车体车辆直线越障偏移问题,建立车辆越障运动的动力学模型.以后车体绕z轴的角速度、沿y轴速度和前车体相对后车体的横摆角速度作为被控量,建立误差运动学模型,对误差系统进行稳定性和能控性分析.由于净转向力矩有上限,采用反步法设计系统的抗饱和控制器,对运动偏移控制中的液压转向机构输出饱和现象进行抑制.通过计算得到了在偏移控制过程中液压转向执行机构的净输出力矩随时间变化的曲线.结果表明:加入抗饱和控制器后,通过前后车体间的转向液压系统控制前后车体相对角速度,车辆越障运动时的y向偏移误差在5 s后收敛至0,前后车体夹角、后车体进方向的偏角也随时间逐渐收敛至0,车辆沿直线路径行进,证明抗饱和控制算法能有效地消除越障偏移误差.
|
| 关 键 词: | 2自由度铰接车体 车辆越障 运动偏移 反步法 饱和控制 |
| 收稿时间: | 2015-06-16 |
| 本文献已被 CNKI 万方数据 等数据库收录! |
| 点击此处可从《哈尔滨工业大学学报》浏览原始摘要信息 |
|
点击此处可从《哈尔滨工业大学学报》下载免费的PDF全文 |
|