|
|||||
|
|
| 移动机器人长期自主环境适应研究进展和展望 | |
| 引用本文: | 阮晓钢, 陈晓, 朱晓庆. 基于多重信息增益的移动机器人探索策略[J]. 北京工业大学学报, 2023, 49(9): 990-998. DOI: 10.11936/bjutxb2021120005 |
| 作者姓名: | 阮晓钢 陈晓 朱晓庆 |
| 作者单位: | 1.北京工业大学信息学部, 北京 100124;2.计算智能与智能系统北京市重点实验室, 北京 100124 |
| 基金项目: | 国家自然科学基金资助项目(62103009); 北京市自然科学基金资助项目(4202005) |
| 摘 要: | 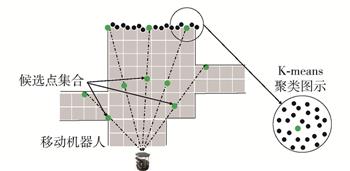 针对移动机器人在未知环境中自主探索及建图存在盲目性的问题, 提出了一种基于贝叶斯优化评估多重信息增益的探索策略。在候选点提取方法上采用融合前沿点聚类与可通行区域的方式综合衡量提取, 相较于传统的前沿点检测方法有效解决了候选点集合过大及环境信息缺失等问题; 在候选点评估方法上利用贝叶斯优化计算多重信息增益, 综合考虑地图熵值与距离成本, 相较于仅考虑地图熵值选取最佳候选点的方法, 有效改进了机器人在环境中的冗余路径。  |
| 关 键 词: | 多重信息增益 贝叶斯优化 自主探索 复合提取策略 栅格-八叉树地图 移动机器人 |
| 收稿时间: | 2021-12-07 |
| 修稿时间: | 2022-02-26 |
| 点击此处可从《北京工业大学学报》浏览原始摘要信息 | |
| 点击此处可从《北京工业大学学报》下载免费的PDF全文 | |
