| 基于机器视觉的自动插件系统设计与研究 |
| |
| 引用本文: | 尤波, 武坤, 许家忠, 等. 基于机器视觉的自动插件系统设计与研究[J]. 光电工程, 2017, 44(9): 919-926. doi: 10.3969/j.issn.1003-501X.2017.09.009 |
| |
| 作者姓名: | 尤波 武坤 许家忠 陈国杰 梁强 田建德 |
| |
| 作者单位: | 1. 哈尔滨理工大学自动化学院,哈尔滨 150080; 2. 衡橡科技股份有限公司,河北 衡水 053000 |
| |
| 基金项目: | 国家自然科学基金资助项目(61370033) |
| |
| 摘 要: | 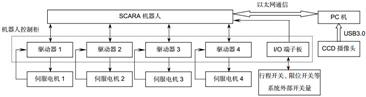
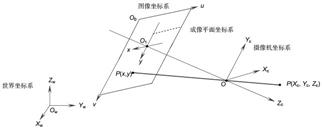
以SCARA机器人、机械夹爪、摄像机CCD为硬件基础,搭建了基于单目视觉的SCARA机器人自动识别和定位插件系统平台,并利用摄像机参数标定和建立的抓取系统参数化模型,将CCD摄像机获取的工件图像坐标信息转化为机器人坐标系下的抓取位置信息。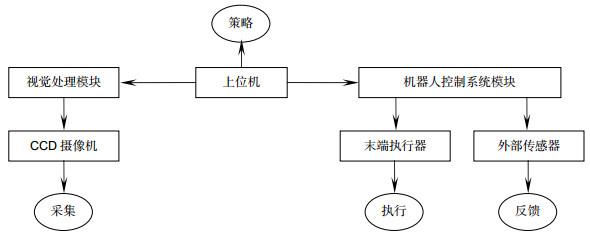
本系统以Visual studio软件为开发平台,利用OpenCV视觉数据库函数进行颜色识别与定位算法开发,经测试,该视觉算法能够实现工件的颜色识别和获取工件的位置信息,并控制机器人夹爪进行目标工件的精确抓取,满足了一般工业生产中抓取工件实时性的要求。
|
| 关 键 词: | SCARA机器人 单目视觉 插件系统 颜色识别 定位 精确抓取 |
| 收稿时间: | 2017-07-29 |
| 修稿时间: | 2017-08-19 |
|
| 点击此处可从《光电工程》浏览原始摘要信息 |
|
点击此处可从《光电工程》下载免费的PDF全文 |
|