| 绳系拖拽系统半物理仿真实验装置设计与控制 |
| |
| 作者姓名: | 张世轩 王琬琪 徐志刚 杜木雄 杨明毅 |
| |
| 作者单位: | 机器人学国家重点实验室中国科学院沈阳自动化研究所,沈阳 110016;网络化控制系统重点实验室中国科学院 沈阳自动化研究所,沈阳 110016;中国科学院 机器人与智能制造创新研究院,沈阳 110169;中国科学院大学 计算机科学与技术学院,北京 100049;华北计算机系统工程研究所,北京 100083 |
| |
| 基金项目: | 国家自然科学基金(61803367); 辽宁省自然科学基金(2019-MS-346) |
| |
| 摘 要: | 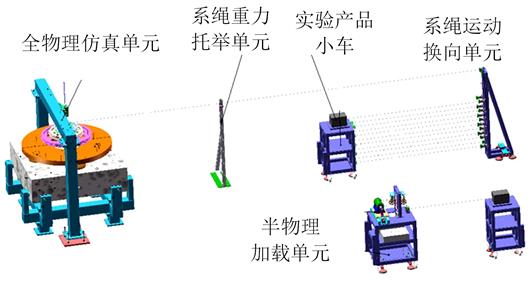
为有效清除太空垃圾,模拟空间中对废弃卫星的回收过程,采用半物理实验技术对绳系收放装置进行地面试验考核,验证绳系收放控制系统的性能。半物理仿真是一种通过实物或物理模型与数学模型相结合进行仿真的技术,通过地面半物理仿真实验对空间任务进行先验,大大减少了空间实验的成本,可有效指导空间任务的设计与控制。首先,对绳系卫星拖拽过程进行动力学建模,明确了拖拽过程的任务目标,确立了绳系拖拽半物理系统的机械组成。其次,设计了全物理仿真单元为被动加载单元,卫星质量采用等效惯量转台模拟。然后,为模拟目标在绳系拖拽作用下的动力学状态,仿真加载单元由半物理仿真方式设计。最后,针对实际试验过程中存在的张力测量误差扰动,设计了基于模型预测控制的控制策略,为了对拖拽过程的张力和绳长精确控制,实验使用双闭环电机联合控制,通过模型预测控制的方式联合张力位置双电机仿真。结果表明,基于模型预测控制的张力误差精度为5%,从而验证了绳系收放控制系统对拖拽过程的控制有效性。
|
| 关 键 词: | 航天系统工程 半物理仿真 全物理仿真 拖拽系统 绳系卫星 模型预测控制 |
| 收稿时间: | 2020-08-20 |
|
| 点击此处可从《哈尔滨工业大学学报》浏览原始摘要信息 |
|
点击此处可从《哈尔滨工业大学学报》下载全文 |
|