| 基于事件相机的连续光流估计 |
| |
| 引用本文: | 付婧祎, 余磊, 杨文, 卢昕. 基于事件相机的连续光流估计. 自动化学报, 2023, 49(9): 1845−1856 doi: 10.16383/j.aas.c210242 |
| |
| 作者姓名: | 付婧祎 余磊 杨文 卢昕 |
| |
| 作者单位: | 1.武汉大学电子信息学院 武汉 430072 |
| |
| 基金项目: | 国家自然科学基金(62271354,61871297);;中央高校基本科研业务费专项资金(2042020kf0019);;测绘遥感信息工程国家重点实验室项目资助~~; |
| |
| 摘 要: | 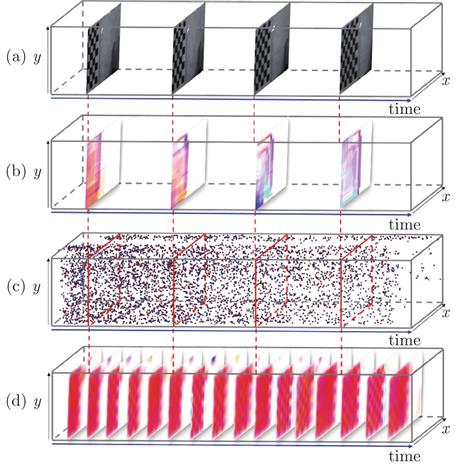
事件相机对场景的亮度变化进行成像, 输出异步事件流, 具有极低的延时, 受运动模糊问题影响较少. 因此, 可以利用事件相机解决高速运动场景下的光流(Optical flow, OF)估计问题. 基于亮度恒定假设和事件产生模型, 利用事件相机输出事件流的低延时性质, 融合存在运动模糊的亮度图像帧, 提出基于事件相机的连续光流估计算法, 提升了高速运动场景下的光流估计精度.
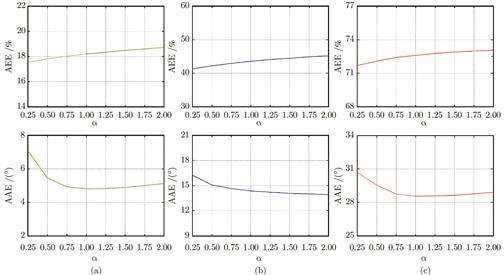
实验结果表明, 相比于现有的基于事件相机的光流估计算法, 该算法在平均端点误差、平均角度误差和均方误差3个指标上, 分别提升11%、45% 和8%. 在高速运动场景下, 该算法能够准确重建出高速运动目标的连续光流, 保证了存在运动模糊情况时, 光流估计的精度.
|
| 关 键 词: | 运动模糊 事件相机 连续光流估计 异步事件流 |
| 收稿时间: | 2021-03-26 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载全文 |
|