| 基于RISE反馈的串联弹性驱动器最优控制方法 |
| |
| 引用本文: | 孙雷, 孙伟超, 王萌, 刘景泰. 基于RISE反馈的串联弹性驱动器最优控制方法. 自动化学报, 2018, 44(12): 2170-2178. doi: 10.16383/j.aas.2018.c170146 |
| |
| 作者姓名: | 孙雷 孙伟超 王萌 刘景泰 |
| |
| 作者单位: | 1.南开大学机器人与信息自动化研究所 天津 300350;;2.天津市智能机器人技术重点实验室 天津 300350 |
| |
| 基金项目: | 国家自然科学基金61573198 |
| |
| 摘 要: | 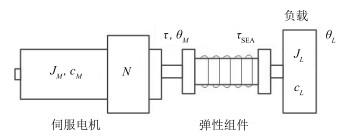
串联弹性驱动器(Series elastic actuator,SEA)是机器人交互系统中的一种理想力源.本文针对非线性SEA的力矩控制问题提出一种基于RISE(Robust integral of the sign of the error)反馈的最优控制方法,能够克服模型参数不确定和有界扰动,实现SEA输出力矩在交互过程中快速平稳地收敛到期望值.
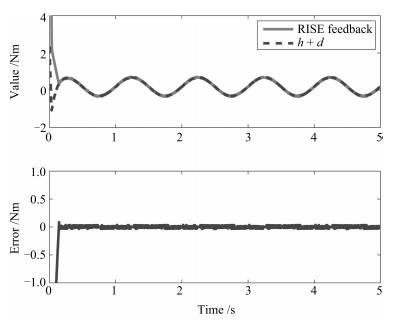
具体来说,首先对SEA的模型进行分析和变换;然后假设模型参数和扰动均已知,并在此基础上基于二次型指标设计最优控制律;之后基于RISE反馈重新设计控制律抵消模型参数不确定性和有界扰动,基于Lyapunov理论分析控制器的收敛性和信号的有界性,实验结果表明这种基于RISE反馈的最优控制方法具有良好的控制性能和对有界扰动的鲁棒性.
|
| 关 键 词: | 串联弹性驱动器 最优控制 RISE 力矩控制 |
| 收稿时间: | 2017-03-17 |
|
| 点击此处可从《自动化学报》浏览原始摘要信息 |
|
点击此处可从《自动化学报》下载免费的PDF全文 |
|