A two level real-time path planning method inspired by cognitive map and predictive optimization in human brain |
| |
| Affiliation: | 1. Biological System Modeling Lab, Faculty of Biomedical Engineering, Amirkabir University of Technology (Tehran Polytechnic), Tehran, Iran;2. Neuromascular Systems Lab, Faculty of Biomedical Engineering, Amirkabir University of Technology (Tehran Polytechnic), Tehran, Iran;1. Department of Applied Mathematics, The Hong Kong Polytechnic University, Hunghom, Kowloon, Hong Kong, China;2. School of Electronics and Computer Science, University of Southampton Malaysia Campus, Nusajaya, Johor, Malaysia;3. Department of Electrical and Computer Engineering, Curtin University, WA, Australia;1. Laboratory of Advanced Design, Manufacturing and Reliability for MEMS/NEMS/OEDS, School of Mechanical Engineering, Jiangsu University, Zhenjiang 212013, PR China;2. School of Mechanical Science and Engineering, Huazhong University of Science and Technology, Wuhan, Hubei 430074, PR China;3. School of Mechanical & Electrical Engineering, Guilin University of Electronic Technology, PR China;1. South Pars Gas Complex, Bushehr, Iran;2. Department of Electrical and Electronic Engineering, Shahid Bahonar University, Kerman, Iran |
| |
| Abstract: | 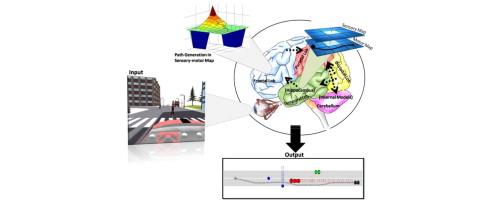
A biologically inspired two level method is proposed for real-time path planning in a complex and dynamic environment, employable in ground vehicles. This method takes the advantage of both global and local path finding procedures. In the first level, i.e., global level, the planner utilizes a neural network architecture as a sensory-motor map, similar to the cognitive map used by humans, and an optimization algorithm to produce a coarse path. In the second level, i.e., local level, the global path is improved by employing a model-based prediction method with a finite prediction horizon in a way that future information about the environment is involved in the planner's decision making. In the suggested method, the prediction horizon is variable and is adjusted in each step of the planning in agreement with the kinematic features of the closest obstacle in the visual field of the planner. We considered four different path planning tasks in a virtual dynamic environment to evaluate the performance of the proposed method against the human path planning strategy. The results demonstrate the ability of the method to plan a strategy comparable to the driving scenarios chosen by most subjects and to generate a real-time collision-free path in a dynamic environment with obstacles. |
| |
| Keywords: | Sensory-motor map Global level Local level Model-based prediction Variable prediction horizon |
| 本文献已被 ScienceDirect 等数据库收录! |
|